
Osaka University Japan – in order to design more efficient robots with higher speed and agility the anatomy of a cat is taken as a model in the project Pneupard. What makes the Pneupard distinct among other biomimetic robots is the use of pneumatic artificial muscles.
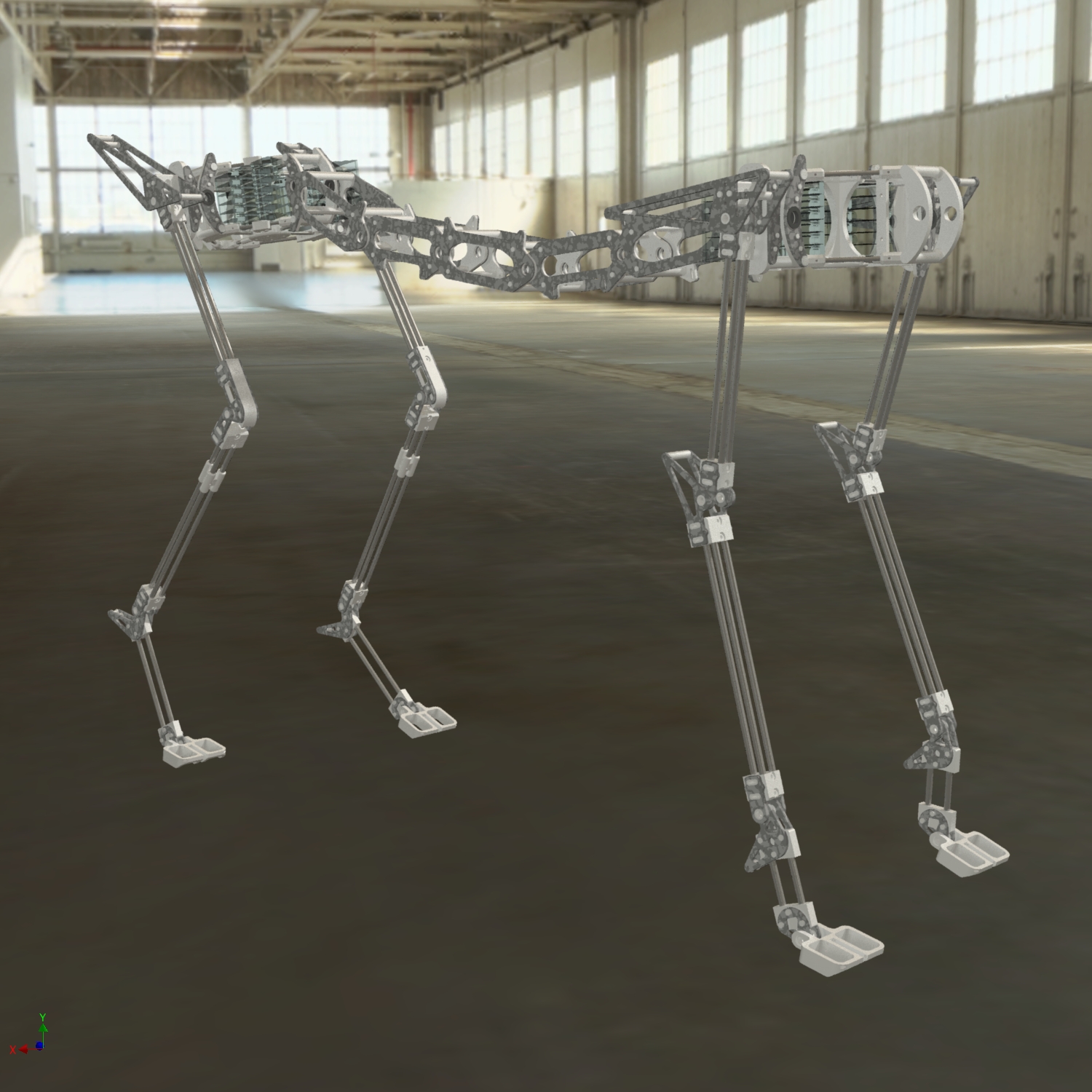
The project team, which also studied pneumatic artificial muscles previously, is from the Graduate School of Information Science and Technology at Osaka University. The main objective of the research is to develop a platform of biomimetic technology for the mobility of the robots by studying the anatomy of cats. Using the muscular and skeleton structure of animals as a model eliminates the need for an advanced control method against disturbances during movement.
Pneumatic artificial muscles are made of rubber and nylon. The rubber tubes covered with nylon are filled with air in order to function like real muscles. Moreover, replicating the limbs of a cheetah / leopard would create a cat-like movement, as well. This is an ongoing project. While the hind limbs have eight muscles, the fore limbs that are under construction will have six. The muscles and limbs are flexible and resistant contrary to the robots with electric motors. There are sensors on each foot of the robot. The spine is considered to have the same flexibility.
The muscles of the hind legs that can be seen in the video are not programmed manually but using the signals (EMG) that were recorded while a cat was walking. Although the robot seems to walk uneasily, with the attachment of the spine its movement will improve.
Source: http://m.spectrum.ieee.org/automaton/robotics/robotics-hardware/osaka-university-pneupard-robot
Video Credit: Osaka University
The Pneupard Project of Osaka University added by hulyacardas on
View all posts by hulyacardas →
You must be logged in to post a comment Login