
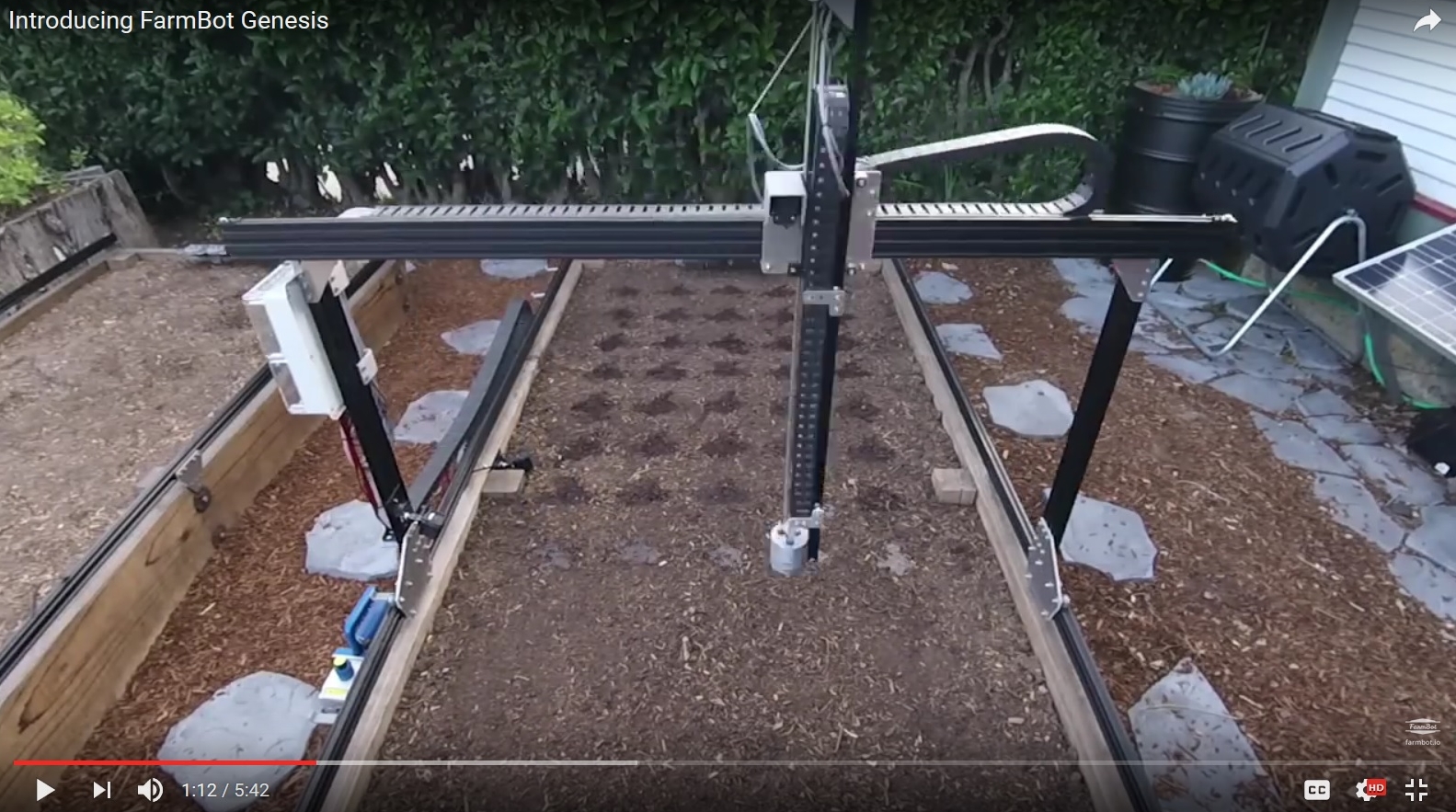
Farmbot is an open source farming robot, for small scale food production. It plants what you want exactly where you want, in any pattern and density, according to user input. It can even detect weeds autonomously, position itself on it, and with a stroke bury them into the ground. The robot first chooses the suitable end effector, for watering, weeding, soil sensing or planting seeds, and then, by moving on its frames horizontally, and its arm vertically, it can reach to any location within the frames and perform the desired task at the specific location. Even watering becomes more efficient with this robot, since it positions itself directly above the plant to be watered, and water only that specific area, selects water amount according to plant type and age, soil conditions, local weather, thus reducing water consumption. With this robot, different types of plants can be grown in the same area at the same time, and still each plant is individually taken care of. The robot can be controlled by smart phone, through a web based user friendly interface, where user can choose what plant to grow where and the robot does all the rest. The robot is controlled by a rasberry pi computer and arduino controller, and precise action can be obtained through stepper motors and rotary encoders. The hardware and software platform is expendable and all coding is open source.
For more, visit company website at: www.farmbot.io

Grow food automatically in your backyard by Farmbot added by editor on
View all posts by editor →