
What is a Planetary Gear?
A planetary gearbox is a compact mechanical transmission used to reduce speed and increase torque in motor-driven systems. It consists of a central sun gear, multiple planet gears that rotate around it, and an outer ring gear, allowing load to be shared across several contact points. This configuration provides high torque capacity, good efficiency, and compact size compared to conventional gear arrangements. In practical applications, a planetary gearbox is placed between the motor and the driven system to adjust performance: for example, in a robot arm joint, it enables a relatively small servo motor to generate enough torque to move the arm; in conveyor systems, it reduces high motor speeds to usable levels while increasing torque; and in CNC or precision motion systems, it improves control and positioning by lowering speed and increasing available force.

While it is possible to increase torque, there are practical limits due to friction. For example a 3V motor cannot turn a tank’s tracks because the required torque and power are far beyond what such a small motor can deliver. While it is possible to increase torque using gear reduction, there are practical limits due to friction and the fundamental constraint of power. A very high gear ratio can theoretically multiply torque to large values, but it reduces speed to the point where motion becomes impractically slow—potentially taking an extremely long time to produce any visible movement. In addition, each gear stage introduces losses, and in multi-stage systems the cumulative friction can exceed the motor’s available output, causing it to stall or overheat before moving the load. Turning tank tracks also requires high starting torque to overcome ground resistance, weight, and track deformation, which a small motor cannot provide. In essence, gears allow a trade-off between speed and torque, but they do not create power; the ability to perform real work ultimately depends on the motor’s power capacity.
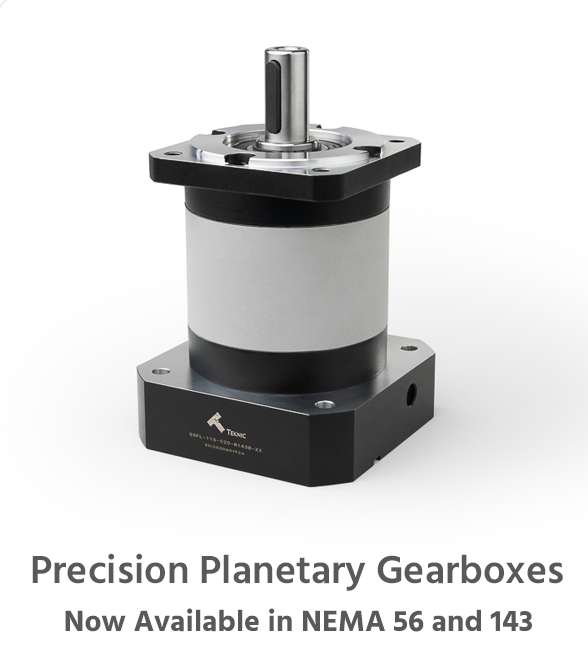
Below is an example of an actual planetary gear from Teknic.
Post By: A. Tuter
Terms of Use: Unauthorized copying is prohibited; we maintain dated records to document original publication. Content may contain inaccuracies. All trademarks mentioned belong to their respective owners, and we are not affiliated with them, and no endorsement is implied. Certain images and/or text in this post are used with permission from the right holders. See our Terms Page.